Deep Neural Networks for vehicle driving characterization by means of smartphone sensors
Autora: Sara Hernández, IPTC Directores: Luis A. Hernández y Rubén Fernández, IPTC
The progress of driving assistance systems brings us closer to complete autonomous driving. One of the main objectives of driving assistance systems is to reduce both the number of traffic accidents and the severity of them. According to the World Health Organization, among the main risk factors are the human errors, the speeding, the distracted driving or unsafe vehicles. This reveals that driver behavior is a very important part in order to reduce the rate of road traffic injuries.
To improve vehicle assistance systems, it is necessary to incorporate information related to both driver behavior characterization and driver recognition. This data allows creating more robust driving systems, improving safety, reducing traffic, pollution and consumption levels.
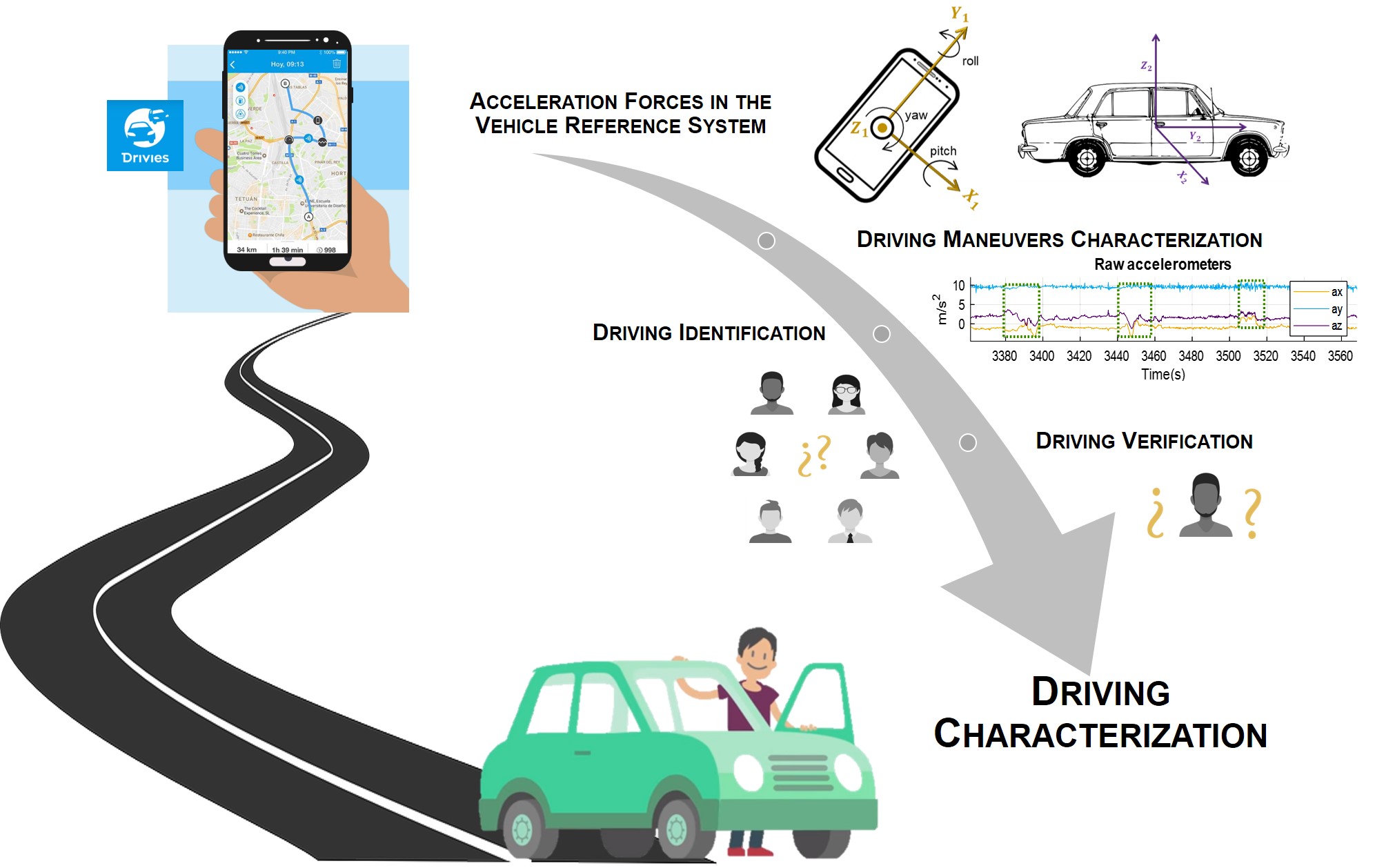
From the hypothesis that each driver has a unique and different behavior when she/he is driving, it is necessary to detect and analyze the type of maneuvers or events performed by these drivers and, like biometric systems, to use behavioral characteristics of a person to authenticate their identity. Data generated by the vehicle, as well as a large number of sensors, are generally used in order to capture driving information. However, these frameworks usually require to install additional equipment or OBD systems in the vehicle, which made difficult the accessibility to the measurements. This has led to many of the current research trying to employ everyday devices, to facilitate monitoring, as it is the case of smartphones.
This Thesis focuses on improving driving characterization with smartphones, specifically using low-consumption tri-axial accelerometers. For that purpose, two related problems are addressed: driving behavior characterization, and drive identification and verification. Using smartphones for these tasks is challenging, so we have studied real data collected from a commercial App and a real use scenario where the smartphone may have a free and not predefined position inside the vehicle. In the Thesis, we present different approaches based on the latest advances in Deep Learning models that have are tested on real databases including more than 60.000 real driving journeys from more than 300 different drivers.
Our results demonstrate that accurate and robust driving characterization is possible using exclusively information from the accelerometers of drivers’ smartphones. Therefore, Deep Learning seems to be an innovative technology suitable for the development of low-battery consumption driving characterization applications. For driver identification and verification, we have also proposed several Deep Learning models inspired on existing image classification and speaker recognition research. Again, using exclusively low-energy accelerometers, our results are competitive with state-of-the-art approaches that requires high consumption sensors such as gyroscopes, magnetometers and GPS.





Comunicación IPTC